技術コラム
第9回 AI・人工知能EXPO【春】参加レポート②
はじめに
第9回 AI・人工知能EXPO【春】参加レポート第二弾です。
今回の展示のメインであった、『外観検査×自律走行×デジタルツイン』のご紹介です。
第二弾 外観検査×自律走行×デジタルツイン
本展示は3つの要素から構成されています。
① 良品画像だけで学習したAIを用いた『外観検査デモ』
② 検品後の製造品の自動運搬を行う『ロボットの自律走行デモ』
③ 製造現場の最適を意識した『デジタルツインデモ』
展示概要
それぞれの展示について説明します。
① 良品画像だけで学習したAIを用いた『外観検査デモ』
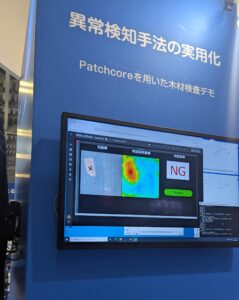
良品学習の一つである『PatchCore』ベースで学習したAI検査です。
本展示では木片の正常データ(画像)を30枚ほど学習させ、正常/異常の検出を行いました。
また、AIの推論(結果判定)はユリ電気商会様の製品である『Kakip』を使用し、
低消費電力かつ、省スペースでの運用をイメージした構成としてます。
さらに、アドバンテック様のSCADAソフトウェアパッケージである『WebAccess』を使用し、
生産数のカウントや異常発生率の表示をしました。
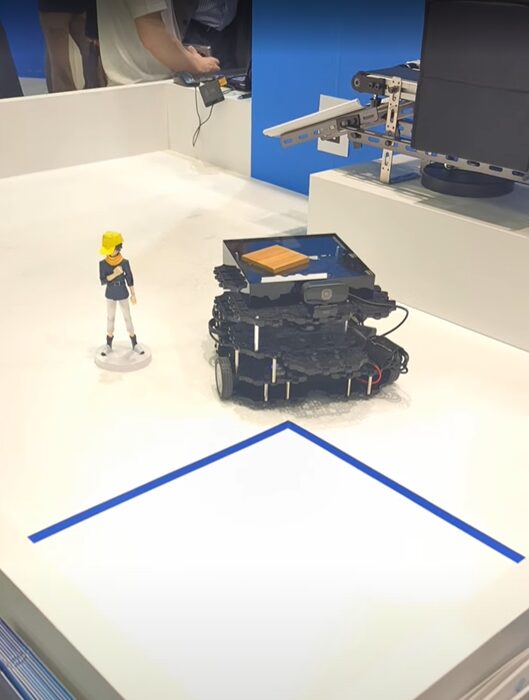
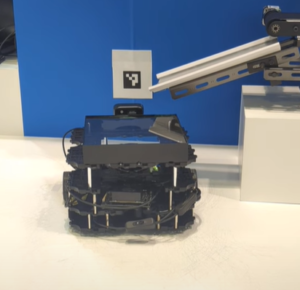
② 検品後の製造品の自動運搬を行う『ロボットの自律走行デモ』


自動搬送をイメージした自律走行ロボットのデモです。
ロボットは『TurtleBot3』を使用しました。
TurtleBot3にはLiDARとRGB-Dカメラが取り付けてあり、TurtleBot3側でセンシング/物体撮影/モーター制御を担当、
TurtleBot3側で取得したデータ(点群、画像)をPC(GPUマシン)に送り、PC側でSLAM/経路計画/人形検知を行う構成です。
リアルタイムに人形を検知し、避けながら目的地へ向かう自律走行を実現しました。
③製造現場の最適を意識した『デジタルツインデモ』

Nvidia様の『Omniverse™』を使用し、ROS2にてデジタルツインを実現しました。
今回の展示では、現実世界のロボットの位置を仮想空間上にリアルタイムで映し出し、
モニターからでもロボットの位置を確認できる仕組みにしました。
そのため、展示ブースに近づかなくても、モニターから判定結果やロボットの位置を確認することができました。
こちらの技術では、自己位置を仮想空間上に映し出すだけではなく、
障害物(人形)を検知し、その結果を仮想空間上に映し出す事も可能です。
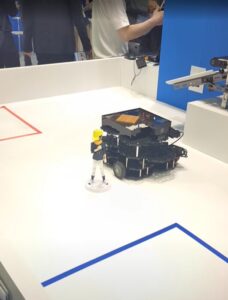
全体の流れ
本展示では①~③のデモを一連の流れで動かしました。
全体の流れは以下の通りです。
1. Dobotにて木材をコンベアに運ぶ

2. 木材を撮影
3. 撮影画像からAI検査実行
4. コンベアからロボットに木片を移す


5. 外観検査結果をロボットに伝える(Wi-Fi 通信)
6. ロボットが検査結果の枠に向かって自律走行を行う(写真は異常判定枠)
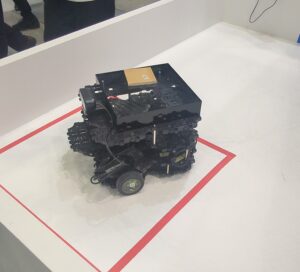
8. ロボットの走行位置をデジタル環境にリアルタイム反映

7. ロボットが初期位置に戻る
展示会中のWifi環境によるトラブルもありましたが、
ロボットが物体を認識しながら動く様は、多くの来場者の興味を惹きつけていました。
デモ展示に関する質問や使用技術に関するお問い合わせがございましたら、お問い合わせフォームよりご連絡ください。
展開レポート 第二弾は以上です。
弊社は今後も技術力で産業界を支えてまいります。